Fail-safe aus dem englischen Übersetzt bedeutet:
trotz Fehler sicher;
zusammengesetzt aus fail „ausfallen“ und safe „gefahrlos“.
Ausfallsicher bezeichnet jede Eigenschaft eines Systems,
die im Fall eines Fehlers zu möglichst geringem Schaden führt.
(soweit Wikipedia)
Ob man die senderseitige Failsave (FS)-Funktion bei Modellflugzeugen oder Modellhubschraubern nutzen möchte, muss jeder für sich selbst entscheiden.
Bei Modellautos finde ich diese Funktion sehr sinnvoll, da der FS-Zustand hier klar definiert werden kann.
Bei Gefahr Motor AUS / BRAKE und das Auto kann keinen großen Schaden mehr anrichten.
Welche Position sollen die Servos bei einem Flugzeug oder Hubschrauber einnehmen?
Bei einem Quadrocopter mit Autopilotsystem (z.B. Naza M Light) und GPS Modul sieht das Ganze schon wieder anders aus.
Hier ist die Elektronik in der Lage das Modell selbstständig an seinen Heimatstandort sicher zurück zufliegen.
Wie das mit einem Futaba FF10 Sender realisiert werden kann möchte ich hier beschreiben.
Dazu eignen sich nur FS-fähige Empfänger die alle benötigten Kanal für einen FS unterstützen !!!
Fall 1
FS soll durch einen Senderausfall oder bei Überschreitung der Senderreichweite etc. ausgelöst werden.
Dieser FS-Fall ist relativ einfach zu „programmieren“.
Alle Kanäle (Steuergeber/Schalter etc.) am eingeschalteten Sender in die Position bringen die bei FS benötigt werden.
In der Regel Roll/Nick/Seite in Neutral, Gas auf 50-60% und falls vorhanden Landegestell ausgefahren.
Nun am eingeschalteten und „gebundenen“ Empfänger die FS-Taste betätigen. Die Senderwerte werden nun im Empfänger „gespeichert“.
Das Betätigen des „Speicherns“ ist abhängig vom verwendeten Empfänger und wird z.B. durch einen optischen oder akustischen Hinweis quittiert und angezeigt.
Fall 2
FS soll durch den Piloten manuell am Futaba FF10 / T10CG – Sender ausgelöst werden.
Dies ist nur unter Verwendung eines Mischprogramms zu Realisieren.
Aber auch das ist kein Hexenwerk, wenn man diese Info´s gelesen hat.
Senderdisplay
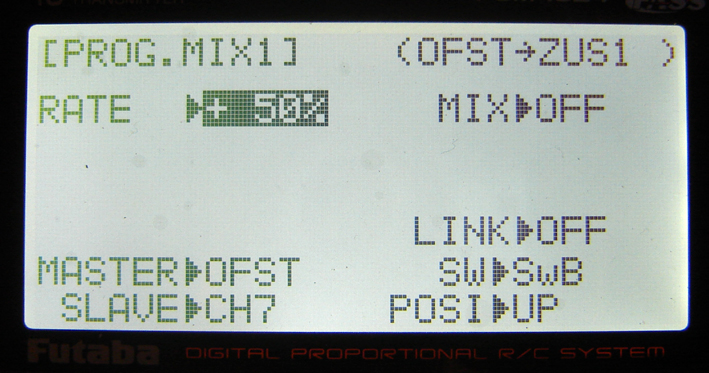
[PROG.MIX1]
In unserem Beispiel ist der programmierbare Mischer Nr.1 gewählt.
(Es gibt die linearen Mischer 1-4 und die linearen Mischer 5-8 bieten noch zusätzlich eine 5 Pkt-Kurve)
(OFST – ZUS1)
Anzeige was gemischt wird.
MASTER „OFST“
MASTER gibt den Steuergeber/Schalter (StG/S) an von dem aus der Mischer betätigt wird.
„OFST“ auswählen, da so ein fester Prozentwert auf den Slavekanal gemischt wird.
SLAVE
Ist der Kanal auf den der Master zumischt.
In unserem Beispiel Kanal 7, da das der gewählte 3-Stufen-Schalter für die Flugzustände GPS Atti.Mode – AttiMode – Manual Mode ist.
(Control Mode Switch)
LINK
Wird nicht benötigt.
SW
StG/S, der das Mischen aktiviert. In unserem Beispiel Schalter B
POSI
Gibt die Schaltebene/Position der StG/S an, wann er aktivieren soll.
Auslöserichtung:
In unserem Beispiel wenn er nach oben betätigt wird.
MIX
Je nach Position des gewählten StG/S wird der Status des
Mischer angezeigt ON oder OFF .
RATE
hier wird der Mischeranteil bestimmt.
Ermitteln der Mischerrate
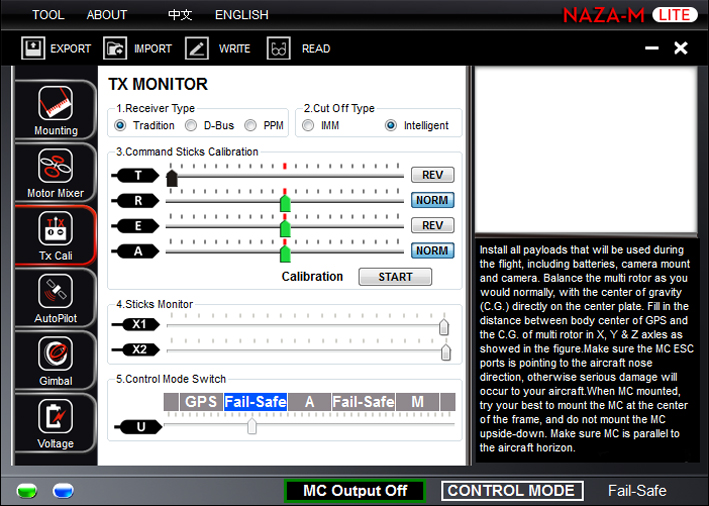
Dazu sollte das Autopilotsystem (hier Naza M Light) aktiv und mit einem PC verbunden sein.
In der DJI-Anwender-Software den Menüpkt TX Monitor öffnen und zu Pkt 5 Control Mode Switch gehen.
FS aktivieren und nun die “ RATE “ mit dem 3D-Key am Sender drehen bis sich das Feld „Failsave“ „Blau“ verfärbt.
Diesen Wert aufschreiben und weiter am 3D-Key drehen bis sich das Feld „Failsave“ „Grau“ verfärbt.
Aus dem ersten Wert und diesem Wert den Mittelwert errechnen und mit dem 3D-Key einstellen.
Das Feld „Failsave“ muss nun wieder „Blau“ verfärbt sein.
Zur Kontrolle alle Flugzustände mit dem Control Mode Switch durchschalten und FS auslösen. Das Feld „Failsave“ muss sich immer „Blau“ verfärben.
Die VU der NAZA flashed bei FS gelb.
Diese Anleitung soll ein „roter Faden sein“.
Die Nutzung/Anwendung/Umsetzung geschieht auf eigene Gefahr und schließt jegliche Haftungen des Betreibers dieser Seite für etwaige entstandene Schäden etc. natürlich aus.
Dieser Beitrag entstand 2014.