Die Theorie
Eine leuchtend LED „zeichnet“ bei einer Rotorkopfumdrehung
einen ganzen Kreis mit gleichbleibendem Radius auf horizontaler Ebene (siehe Bild1)
(Radius = Abstand der LED zur Hauptrotorwelle).
Vier LED`s mit unterschiedlichem Radius „zeichnen“ 4 Kreise auf horizontaler Ebene (siehe Bild2).
Betrachtet man nun die Spirale (siehe Bild3), ist das nichts anderes wie Bild2,
nur das die 4 LED`s nicht ständig „zeichnen“ bzw. leuchten.
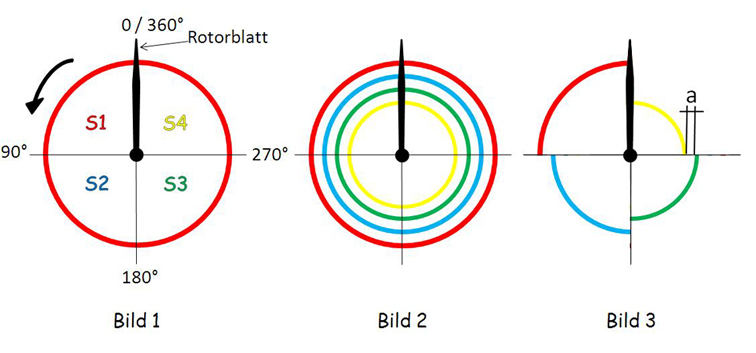
Teilt man den Kreis in 4 Sektoren (S1-4) auf,
kann man jeder LED einem Sektor zuordnen in dem sie leuchten soll.
Wenn das Rotorblatt bei 0° steht, soll LED1 leuchten.
Das Rotorblatt dreht sich und die LED1 leuchtet im Sektor 1.
Das Rotorblatt kommt zur Position 90° (1.Takt).
Die LED1 geht aus und LED2 leuchtet den gesamten Sektor 2 lang.
Das Rotorblatt kommt zur Position 180° (2.Takt).
Die LED2 geht aus und LED3 leuchtet den gesamten Sektor 3 lang, usw. …
Der Bogen bzw. die Spiral sieht so sehr unförmig aus.
Das liegt daran das die Sektoren und die LED-Abstände (a) zu groß sind.
Es müssen also mehr LED´s verwand werden.
Oh, nein!?
Mehr LED`s = mehr Sektoren = kleinere Winkel = mehr Takte
Die Taktung:
Das Rotorblatt des LMH hat eine gerade Nasenleiste von 21cm Länge.
An dieser hinteren Blattkante sollten die 10 LED´s angebracht werden
und der Reihe nach getaktet werden.
Da die Spirale sich nicht optisch nach außen oder innen wegdrehen oder bewegen sollte,
musste die Taktung drehzahlabhängig erfolgen.
Diese Vorgabe kann ein Counter-IC erfüllen,
das die Pulse am Takteingang für die Ausgänge 0-9 durchschaltet.
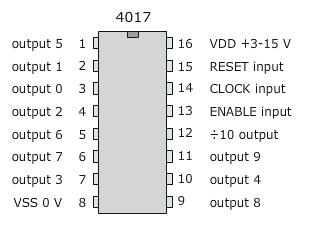 Da ich nun mit 10 LED`s arbeiten möchte, brauche ich auch 10 Sektoren,
Da ich nun mit 10 LED`s arbeiten möchte, brauche ich auch 10 Sektoren,
d.h. alle 36° muss ein Taktimpuls erzeugt werden.
Wer einen GV-1 Drehzahlregler verwendet, kennt das Prinzip der Taktung.
Ein „dynamischer Magnet“ (auf dem Lüfterrad angebracht) läuft
an einem „statischen Hallsensor“ (am Motorblock angebracht) vorbei.
Der Hallsensor generiert in diesem Moment dann den Impuls/Takt.
In meinem Fall muss es aber genau anders herum sein.
Der Magnet ist statisch und der Hallsensor ist dynamisch.
Das Counter-IC befindet sich am drehenden Rotorkopf und ist direkt mit dem Hallsensor verbunden.
Diese Lösung hat den Vorteil, je schneller die Rotorgeschwindigkeit (0-1900 U/min) ist,
desto höher ist die Taktung.
So bleibt der Effekt der „statischen“ Spirale erhalten.
Die Taumelscheibe:
Die letzte Hürde war noch zu nehmen.
Wo und wie bringe ich den Hallsensor
und die 10 Magnete mit einem Kreisbogenmaß von 36° am LMH an?
Es musste nun eine Stelle am LMH-Rotorkopf gefunden werden,
die sich dreht bzw. nicht dreht.
Die Taumelscheibe!
Es wurde eine neue Taumelscheibe produziert.
Wobei „neu“ nicht ganz richtig ist.
Die Alte wurde nur etwas in ihrer Form verändert und
mit einer angepassten Kunststoffform ergänzt.